 Телевизионная система навигации и наблюдения (ТСНН) разработана для решения навигационных и научных задач миссии "Фобос-Грунт".
Телевизионная система навигации и наблюдения (ТСНН) разработана для решения навигационных и научных задач миссии "Фобос-Грунт".
ТСНН включает четыре телевизионные камеры на основе ПЗС-структур – две широкоугольные (ШТК) и две узкоугольные (УТК).
Камеры расположены попарно на противоположных сторонах несущей конструкции перелетного модуля КА, обеспечивая стереосъемку с двухметрового базиса.
Основные характеристики ТВ-камер ТСНН
| Относительное отверстие | УТК | ШТК |
|---|---|---|
| Относительное отверстие | 1:7 | 1:2 |
| Фокусное расстояние, мм | 500 | 18 |
| Тип фотопроемников | ПЗС-матрица | |
| Количество активных эелементов | 1000 x 1000 | |
| Размер элемента, мкм | 7,4 х 7,4 | |
| Разрешение, угл.сек | 3,04 | 84,8 |
| Поле зрения, град | 0,85 | 23,3 |
| Радиометрическое разрешение, бит | 10 | |
| Масса, кг | 2,7 | 1,7 |
| Энергопотребление, Вт | 8 | |
Проверка характеристик съёмочных камер ТСНН

Снимок Луны, полученный узкоугольной камерой (УТК ТСНН)
По результатам съемок проверены разрешение и чувствительность УТК ТСНН и подтверждена возможность ее использования для съемок Фобоса с высоким разрешением с орбит искусственного спутника Марса.
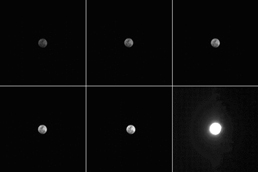
Снимки Луны, полученные широкоугольной камерой (ШТК ТСНН) при различных временах накопления
Подтверждена линейность характеристики свет-сигнал камер ТСНН. Проверено отсутствие растекания заряда при максимальных временах накопления, что позволит в полете получать снимки Фобоса на фоне звезд для решения навигационных задач.

Наблюдение прохождения звезд через поле зрения широкоугольной камерой (ШТК ТСНН)
Подтверждена возможность регистрации с помощью ШТК звезд до 5-ой величины включительно. Наблюдение за перемещениями звезд в поле зрения камер ТСНН позволит, в частности, проверить в полете работу системы ориентации КА.
Измерения высоты космического аппарата над поверхностью Фобоса по стереоизображениям ШТК
При спуске КА «Фобос-Грунт» на поверхность Фобоса по получаемым двумя камерами ШТК стереоизображениям 1 раз в 6 секунд будут проводиться измерения высоты КА.
Отработка алгоритма измерения высоты проводилась на стенде ТСНН, где камерам ТСНН предъявлялась последовательность модельных стереоизображений поверхности Фобоса с разрешением и стереопараллаксом, соответствующими реальной траектории спуска.
На рис.1 показан пример результатов выполненных на стенде ТСНН измерений на участке снижения от ~1 км до ~10 м. За это время ШТК выполняет 20 циклов измерений.
Штриховой линией показано изменение высоты в соответствии с реальной траекторией посадки, а сплошной линией – расчетное изменение высоты в соответствии с изменением параллакса сформированной модельной последовательности стереоизображений. Поскольку при моделировании задавались только целочисленные значения параллакса, на верхнем участке траектории модельная высота изменяется скачкообразно.
Реальные измерения высоты с помощью ШТК, обозначенные крестиками, хорошо ложатся на модельный график изменения высоты, который и соответствует предъявленным камере изображениям.
Показанные на рис. 2 ошибки измерений высоты уменьшаются от ~100 м на высоте 1 км до ~10 м на высоте 300 м и до 1-2 см на высоте 10 м.
При измерении высоты соответствие устанавливалось для 6…10 опорных точек стереопары (при максимальном количестве 10 точек) – рис.3, что свидетельствует о хорошей устойчивости функционирования алгоритма.
Построение карты неоднородностей поверхности Фобоса,
выбор места посадки
При посадке КА «Фобос-Грунт» на поверхность Фобоса по изображениям, получаемым широкоугольной телевизионной камерой (ШТК), входящей в состав телевизионной системы навигации и наблюдения, будет строиться и передаваться в бортовой вычислительный комплекс (БВК) карта неоднородности поверхности, по которой в БВК может определяться пригодность места посадки, прогнозируемого по текущим траекторным измерениям, а в случае его непригодности – приниматься решение о перенацеливании КА на наиболее ровный участок заданного размера в поле зрения ШТК.
Карта неоднородности строится по признаку относительной дисперсии яркости изображения с дополнительным учетом наличия теней и близости крупных неоднородностей. С этой целью обработка изображений ведется в движущемся окне, размер которого соответствует требуемому размеру посадочной площадки (~10 м) и подстраивается при снижении КА.
Для более точного определения оптимального места посадки анализ проводится с перекрытием окон, которое увеличивается при снижении КА. На малых высотах проводится дополнительное загрубление изображений для того, чтобы избежать влияния текстуры реголита на контраст изображений.
Бортовое программное обеспечение, реализующее данный алгоритм, написано на языке Си. Время выполнения операций по построению карты неоднородности на процессоре ADSP-21060 ШТК с тактовой частотой 24 МГц составляет около 0.1 с. Карта неоднородности передается в БВК наряду с репортажным кадром и результатами измерения высоты и бокового смещения один раз в 6 с.
Алгоритм отработан по реальным изображениям Фобоса, Луны и Марса высокого разрешения, а также по модельным изображениям шероховатых поверхностей. Для иллюстрации на рисунке приведено построение карты неоднородности по полученному c КА Mars-Express изображению Фобоса, содержащему предполагаемый район посадки. Получаемая карта неоднородности поверхности адекватно отображает опасные неровности и позволяет выбрать оптимальное место посадки.
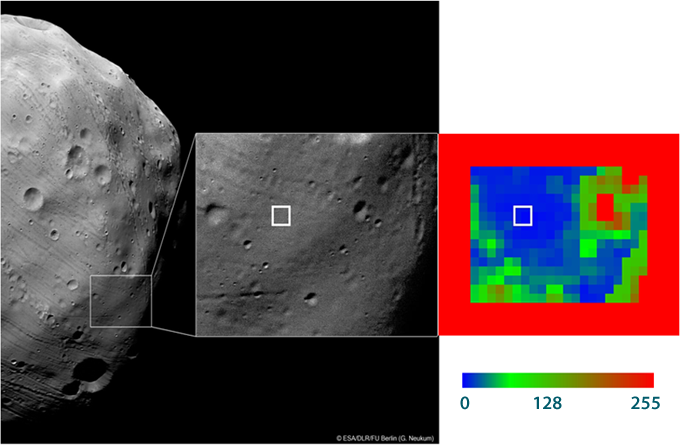
Исходное изображение Фобоса (слева) имеет разрешение 4,4 м (предоставлено ESA/DLR/FU Berlin, G.Neukum). Его увеличенный фрагмент (в центре) соответствует предварительно выбранному району посадки.
Построенная для этого района карта неоднородности (справа) цветокодирована так, что при увеличении неоднородности поверхности цвет карты изменяется от синего к красному.
Оптимальное место посадки отмечено белым квадратом.
Калибровка камер Телевизионной системы навигации и наблюдения
1. Геометрическая калибровка камер ТСНН
 Геометрическая калибровка камер ТСНН проводилась методом автоколлимационной засечки на специальном стенде:
Геометрическая калибровка камер ТСНН проводилась методом автоколлимационной засечки на специальном стенде:
основание 1, держатель калибруемой камеры 2 с посадочным местом 3 для установки камеры (положение камеры при его установке показано пунктиром, два плоскопараллельных зеркала (съемное юстировочное 4 и контрольное 5), два автоколлимационных теодолита (измерительный 6 и контрольный 7), накладной высокоточный уровень 8.
По результатам калибровок для каждой камеры измерены:- фокусное расстояние
- положение главной точки
- суммарная дисторсия
съёмочные характеристики камер соответствуют требованиям технического задания. Значения дисторсии камер не превышает один элемент по всему полю изображения.
2. Радиометрическая калибровка камер ТСНН
 Радиометрическая калибровка камер ТСНН проводилась по интегрирующей сфере. Калибровка включала следующие измерения:
Радиометрическая калибровка камер ТСНН проводилась по интегрирующей сфере. Калибровка включала следующие измерения:
- проверку шумовых характеристик камер
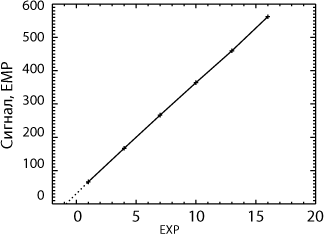
- определение диапазона линейности сигнала
- измерение темнового тока
- измерение распределения абсолютной чувствительности по полю кадра в зависимости от времени экспонирования, коэффициента усиления и смещения видеосигнала
Пример калибровки чувствительности камеры ТСНН, подтверждающий линейность характеристики свет-сигнал.
Результаты радиометрической калибровки камер ТСНН позволяют корректировать их неоднородность чувствительности и осуществлять переход от цифрового сигнала к значениям абсолютной яркости каждого элемента изображения.