Стенд определения матриц взаимной ориентации предназначено для проведения взаимной привязки систем координат звёздного датчика. Взаимная привязка необходима для уменьшения систематических погрешностей, как внутри прибора ориентации, так и между приборами при их комплексной работе на КА.
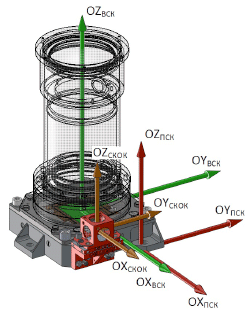
Системы координат звёздного датчика
Привязку можно разделить на три этапа: автономную, комплексную и лётную. В ИКИ РАН проводится автономная калибровка каждого звёздного датчика. Комплексная осуществляется на КА предприятием-изготовителем КА. Лётная калибровка проводится при лётных испытаниях по прямым измерениям приборов.
Методики наземной привязки основаны на измерениях тремя тахеометрами с допустимой инструментальной среднеквадратической погрешностью измерения горизонтальных и вертикальных углов не более 2". Два тахеометра стенда используются для реализации системы координат зеркального куба и фиксируют путем автоколлимации положение двух граней зеркального куба прибора или куба, установленного на кронштейне стенда. Третий тахеометр – проекционный – используется для реализации ВСК путём проецирования одиночной звезды в поле зрения прибора. Поворотами третьего теодолита осуществляется сканирование поля зрения и измерения направлений на звезду, как средствами прибора, так и средствами теодолита. Для построения внутренней системы координат используется от 14 до 32 точек, расположенных в виде креста с шагом между узлами 1°. Взаимные измерения угловых положений всех теодолитов, позволяют связать направления, измеренные прибором с зеркальным кубом.
После множественных измерений выполняется программно-математическая процедура уравнивания ошибок методом наименьших квадратов и определения трех углов перехода между системами координат.
Привязка через классные отверстия и посадочные плоскости даёт СКО определения направления оптической оси звёздного датчика порядка 30 угл. с и СКО угла вращения вокруг оптической оси более 1 угл. мин.
Использование зеркальных кубов и проведение автоколлимационных измерений сначала в ИКИ РАН, а затем на КА, позволяют уменьшить итоговые погрешности привязки в два раза, а именно до 15 угл. с по трём осям для высокоточных звёздных датчиков типа БОКЗ-ВТ, и не более 15 угл.с (определение направления) и 38 угл. с (вращение вокруг оптической оси) для других приборов.