Исторически первыми системами, использовавшимися для управления процессами стыковки космических аппаратов, были радиотехнические системы. 30 октября 1967 года состоялась первая автоматическая стыковка беспилотных кораблей КОСМОС 186 и КОСМОС 188. С этого времени более 20 лет система «Игла» использовалась в различных космических программах для обеспечения автоматических стыковок пилотируемых и беспилотных кораблей, при создании и обслуживании орбитальных станций «Салют», «Мир». Дальнейшим развитием системы "Игла" является система стыковки "Курс". В 1986 году состоялась первая стыковка с использованием этой системы.

Однако, характеристики подобных радиотехнических систем стыковки являются не вполне удовлетворительными. Одной из проблем является сложная конфигурация объектов, с которыми осуществляется стыковка. Радиочастотный сигнал испытывает сложные переотражения от элементов конструкции, которые могут не только вносить заметные ошибки в результаты измерений, но и вызывать сбои слежения за измеряемыми параметрами относительного перемещения. Дополнение радиотехнических систем системами оптического диапазона позволяет существенно увеличить надежность процесса стыковки, повысить его устойчивость к сбоям.
В Отделе оптико-физических измерений проводятся исследования возможностей решения задач стыковки с помощью Видеометра, предназначенного для установки на пилотируемом транспортном корабле (ПТК). Видеометр, осуществляющий наблюдение мишени, устанавливаемой на стыковочной узле международной космической станции (МКС), позволяет определять взаимное положение и относительные скорости линейных и угловых перемещений ПТК и МКС и передавать полученную информацию в бортовую систему управления для реализации процесса автоматической стыковки.
Требования к характеристикам Видеометра
| Параметр | Значение |
| Диапазон измерения дальности, м | от 0,2 до 500 |
| Диапазон измерения скорости сближения, м/с | от -2 до +2 |
| Диапазон измерения углов отклонения цели (мишени) от оси визирования (по Y и Z), град | от -5 до +5 |
| Диапазон измерения углов взаимного крена (вокруг оси Х) для дальности до 30 м, град | от -180 до +180 |
| Диапазон измерения углов отклонения КА от оси визирования в системе координат стыковочного узла цели, град | от -5 до +5 |
| Погрешности: | |
| Средняя квадратическая погрешность измерения дальности по уровню 3σ должна быть не более: - на дальности от 0,2 до 100 м, % - на дальности от 100 до 500 м, м | 5 5 |
| Средняя квадратическая погрешность измерения скорости по уровню 3σ должна быть не более: - на дальности от 100 до 500 м (v = ±1 м/с), м/с - на дальности от 20 до 100 м (v = ±0,7 м/с), м/с - на дальности от 0,2 до 20 м (v = ±0,2 м/с), м/с - за пределами указанных диапазонов (от текущего значения скорости), % | 0,1 0,05 0,01 10 |
| Средняя квадратическая погрешность измерения углов отклонения цели (мишени) от оси визирования по уровню 3σ должна быть не более, град | 0,1 |
| Средняя квадратическая погрешность измерения углов отклонения КА от оси визирования в системе координат стыковочного узла цели по уровню 3σ должна быть не более (на дальности от 0,2 до 30 м), град | 0,3 |
| Средняя квадратическая погрешность измерения углов взаимного крена по уровню 3σ должна быть не более (на дальности от 0,2 до 30 м), град | 0,3 |
| Частота выдачи информации в СУБК ПТК, Гц | 5 |
| Временная задержка выдачи информации, с | 0,2 |
Рассматриваются варианты Видеометра, состоящего из одной или двух камер. В случае использования двух камер одна из них предназначена для работы на дальних расстояниях, вторая – на ближних. Вариант с одной камерой более простой и может быть реализован в случае относа Видеометра вглубь ПТК и/или мишеней вглубь стыковочного узла МКС, чтобы уменьшить влияние дефокусировки изображения на близких расстояниях.
Предложена трехуровневая структура мишени, позволяющая выполнять измерения с требуемой точностью, как на дальних, так и на ближних расстояниях.
С точки зрения способа освещения рассматриваются варианты активной и пассивной мишени.
В случае активной мишени она составляется из собственных источников излучения, в качестве которых могут быть использоваться маломощные светодиоды или лазерные диоды. Указанные источники излучения можно поместить внутри МКС в месте, удобном для обслуживания, и выводить их излучение на мишень с помощью оптоволоконных кабелей.
Пассивная мишень может быть составлена из уголковых отражателей и подсвечиваться с ПТК. Преимущество данного варианта – долговечность мишени, недостаток – сложность реализации подсветки, для которой требуется мощный лазерный источник на ПТК, установленный максимально близко к оптической оси Видеометра для получения достаточного сигнала обратного рассеяния.
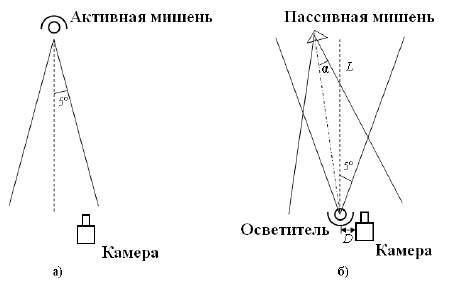
Схема освещения в вариантах активной (а) и пассивной (б) мишени.